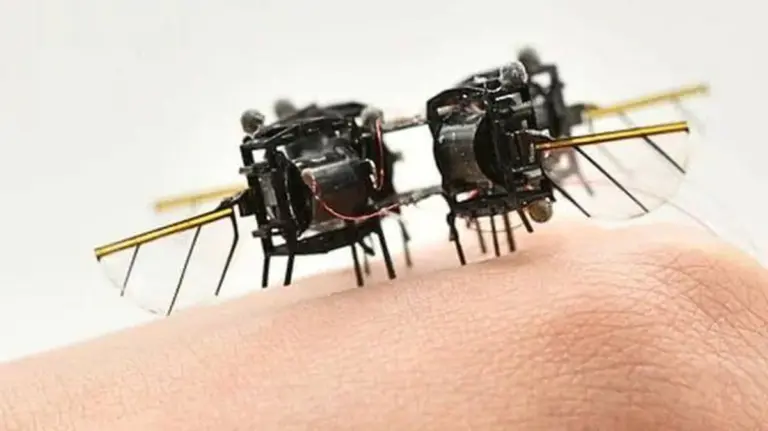
Ein Team von Ingenieuren am Massachusetts Institute of Technology (MIT) hat einen Mikroroboter entwickelt, der die Beweglichkeit eines Insekts imitiert. Diese winzigen fliegenden Roboter sind nicht nur schnell, sondern auch extrem wendig.
Akrobatische Manöver und Intelligenz
Die Roboter sind in der Lage, akrobatische Manöver wie Überschläge und plötzliche Wendungen durchzuführen, wobei sie eine herausragende Beschleunigung erreichen. Ein Fortschritt in der künstlichen Intelligenz ermöglicht es diesen Robotern, komplexe Flugbewegungen in Echtzeit zu steuern.
Anwendungen und Umweltauswirkungen
Die potenziellen Anwendungen dieser Technologie sind weitreichend. In der Zukunft könnten diese kleinen fliegenden Roboter dazu beitragen, Personen zu finden, die nach einem Erdbeben unter Trümmern eingeklemmt sind. Ihre geringe Größe und Wendigkeit ermöglichen es ihnen, enge Lücken zu überqueren, in die herkömmliche Drohnen nicht eindringen können.
Zudem könnte die Nutzung dieser Roboter die Abhängigkeit von schwerem Gerät verringern und die Risiken in gefährlichen Situationen reduzieren. Technologie wie diese hat das Potenzial, Notfalleinsätze zu verbessern und den Umweltschutz zu fördern.
Technische Fortschritte
Der neueste Mikroroboter des MIT, der etwas größer als eine Mikro-Kassette ist und weniger wiegt als eine Büroklammer, wurde mit größeren Flügeln und weichen künstlichen Muskeln ausgestattet, die mit sehr hohen Frequenzen schlagen können. Die größte Herausforderung bestand bislang in dem verwendeten Steuerungssystem, das manuell eingestellt werden musste und das volle Potenzial der Robotermotorik nicht ausschöpfen konnte.
Künstliche Intelligenz im Einsatz
Um die Robotermotorik aggressiv und präzise zu steuern, war ein System erforderlich, das Unwägbarkeiten bewältigen, komplexe Manöver optimieren und in Millisekunden reagieren kann. Die Zusammenarbeit mit einem Team von Jonathan How führte zu einem bedeutenden Fortschritt: einer zweistufigen Architektur, die sowohl robust als auch agil ist.
Zunächst entwickelten sie einen modellbasierten prädiktiven Kontroller, der das Verhalten des Roboters vorhersagt und den optimalen Plan für jede extremen Manöver berechnet. Dieser Planer kann sogar plötzliche Bremsungen oder eine Serie von Überschlägen simulieren und dabei physikalische Grenzen und Sicherheitsaspekte berücksichtigen.
Anschließend wurde eine auf tiefem Lernen basierende Politik trainiert. Diese komprimiert die komplexe Intelligenz in ein leichtes und in Echtzeit ausführbares Modell, wobei die richtige Menge an Trainingsdaten generiert wurde, um das System nicht zu überlasten und alle kritischen Szenarien abzudecken.
Beeindruckende Leistungen
In Tests flog der Mikroroboter mit einer Geschwindigkeit, die um 447 % höher war, und beschleunigte um 255 %, während er außergewöhnliche Präzision beibehielt. Er zeigte „sakkadische“ Bewegungen, die die Orientierung und Stabilisierung der Sicht bei Insekten unterstützen. Diese biomimetische Technologie eröffnet die Möglichkeit, Kameras und Sensoren für autonome Flüge in der Außenwelt zu integrieren.
Forschung und Entwicklung
Die nächste Herausforderung besteht darin, die Mikroroboter unabhängig von externen Bewegungserfassungssystemen fliegen zu lassen. Es werden auch Studien durchgeführt, um zu untersuchen, wie Kollisionen zwischen den Robotern vermieden werden können und wie man koordinierte Flüge in Gruppen ermöglicht.
Fachkundige Stimmen wie die von Sarah Bergbreiter von der Carnegie Mellon University heben hervor, dass der Roboter in der Lage ist, präzise Manöver auszuführen, selbst bei Turbulenzen von über einem Meter pro Sekunde und trotz der festgelegten Toleranzen in der Produktion in so kleinem Maßstab.
Obwohl der Kontroller derzeit noch nicht an Bord des Roboters ausgeführt wird und einen externen Computer benötigt, zeigen die Tests, dass vereinfachte Versionen in Zukunft im Roboter selbst funktionieren könnten. Dies wäre ein signifikanter Fortschritt zur Skalierung dieser Technologie für reale Einsätze.
Potenzial der Technologie
Diese Technologie hat das Potenzial, eine entscheidende Ressource für Aufgaben zu werden, die gegenwärtig hohe Ressourcenintensität erfordern. Mögliche Anwendungen umfassen:
- Inspektion von Solar- oder Windkraftanlagen, ohne den Einsatz von Hubschraubern oder schweren Fahrzeugen;
- Überwachung von Wäldern auf Brandherde, bevor sie sich ausbreiten;
- Bewertung von Schäden nach Stürmen oder Überschwemmungen, ohne menschliches Personal in Gefahr zu bringen;
- Kartierung der Biodiversität in Schutzgebieten, ohne die Tierwelt zu stören.
Diese Entwicklung ist nicht nur ein Roboter-Meilenstein, sondern auch ein Weg zur Reduzierung von Umweltauswirkungen, zur schnelleren Reaktion auf Notfälle und zur Erweiterung des Spektrums des Umweltschutzes, ohne dass unsere technologische Fußabdruck vergrößert wird. Ein kleiner Roboter mit großen Ambitionen ist ein Beispiel dafür, wie Innovationen tatsächlich mit einer nachhaltigeren Zukunft in Einklang gebracht werden können.